
Die Fakultät für Technische Wissenschaften und die Fakultät für Kulturwissenschaften der Universität Klagenfurt (AAU) haben für den Zeitraum von 2021-2024 ein interdisziplinäres Karl Popper Kolleg vorgeschlagen, das von vier Professoren (Sicherheit, Software Engineering, Psychologie und Ethik) organisiert wird und im Mai 2020 vom Rektorat der AAU genehmigt wurde. Der Titel lautet “Responsible Safe and Secure Robotic Systems Engineering (Seerose)“.
Robotik-Ethik verlangt von Programmierern, Code zu schreiben, der nicht nur funktional korrekt, sondern auch sicher und zuverlässig ist, um beabsichtigten oder unbeabsichtigten Schaden für Menschen auszuschließen. Daher tragen Programmierer eine Verantwortung gegenüber verschiedenen Instanzen (z. B. Systemkunden, Anbietern, Endbenutzern usw.), für die ein Bewusstsein erforderlich ist (ebenso für Fragen der Haftung, die eine komplexe Angelegenheit der zeitgenössischen Forschung und Gesetzgebung darstellen). SEEROSE zielt darauf ab, nutzbare Robotik-Sicherheit zu erreichen, indem prozessethische, psychologische und technische Aspekte der Entwicklung sicherer und zuverlässiger Robotiksysteme gemeinsam angegangen werden.
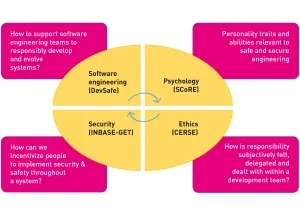
Die folgende Abbildung gibt einen Überblick über die vier Schlüsselbereiche und die wichtigsten Forschungsfragen, die von SEEROSE behandelt werden.
 Seerose | Graphik
Seerose | Graphik
SEEROSE umfasst ein Promotionsprojekt in jedem Schlüsselbereich: Ziel des Promotionsprojekts DevSafe ist es, Techniken und Werkzeuge bereitzustellen, um Entwickler bei der verantwortungsvollen Entwicklung und Weiterentwicklung sicherer und zuverlässiger Robotiksysteme zu unterstützen. Ziel des Promotionsprojekts INBASE-GET ist es, Mechanismen bereitzustellen, um Entwickler und Roboterkollaborateure zu motivieren, Sicherheitsvorkehrungen aus eigenem Interesse zu nutzen und zu befolgen. Ziel des Promotionsprojekts SCoRE ist es, ein Instrument für die psychologische Beurteilung der Kernqualifikationen bereitzustellen, die für Robotikingenieure relevant sind. Und schließlich ist es das Ziel des Promotionsprojekts CERSE, eine Richtlinie für die Implementierung eines prozessethischen Verfahrens für die verteilte Verantwortungsübernahme im sicheren und zuverlässigen Robotic Systems Engineering bereitzustellen.
Die Ziele von SEEROSE stimmen gut mit den Forderungen des jüngsten Wiener Manifests zum Digitalen Humanismus überein. Diese Initiative fordert, dass “Praktiker überall ihre gemeinsame Verantwortung für die Auswirkungen von Informationstechnologien anerkennen sollten”, und “Es wird eine Vision für neue Bildungslehrpläne benötigt, die Wissen aus den Geisteswissenschaften, den Sozialwissenschaften und den Ingenieurwissenschaften kombiniert”, und “Studenten sollten lernen, Informationstechnologie-Fähigkeiten mit dem Bewusstsein für die ethischen und gesellschaftlichen Fragen zu verbinden, um die es geht.” SEEROSE geht diese Forderungen direkt an.
Mitglieder des SEEROSE Kollegs
Kerngruppe
Ao. Univ.-Prof. Mag. Dr. Rainer Alexandrowicz
E-Mail:Rainer [dot] Alexandrowicz [at] aau [dot] at
 Larissa Krainer | Foto: aau/Puch
Larissa Krainer | Foto: aau/Puch
Ao.Univ.-Prof. Mag. Dr. Larissa Krainer
E-Mail:Larissa [dot] Krainer [at] aau [dot] at
Univ.-Prof. Dipl.-Ing.Dr. Martin Pinzger
E-Mail:Martin [dot] Pinzger [at] aau [dot] at
Assoc. Prof. DDipl.Ing.Dr. Stefan Rass
E-Mail:Stefan [dot] Rass [at] aau [dot] at
PHD Studenten
 Nicole Duller
Nicole Duller
Mag. Nicole van Geel
E-Mail:Nicole [dot] vangeel [at] aau [dot] at
Projekt: Collective Ethical Responsibility for Robotic Systems Engineering with Security & Safety (CERSE)
Robotiksysteme nehmen zunehmend an vielen Praktiken im Alltag teil. Technologische Entwicklung und Innovation transformieren Bereiche wie Industrierobotik, Medizintechnik bis hin zur Erforschung des Weltraums. Neue Möglichkeiten gehen jedoch mit neuen Formen der Verantwortung einher.
Engineering selbst ist ein Prozess, der von vielen (per)formt wird; Einzelpersonen, Teams, Systeme, Normen, Kulturen und Gesetze, um nur einige zu nennen. Dieses PhD-Projekt befasst sich mit den ethischen Herausforderungen, die innerhalb des sicheren und zuverlässigen Robotiksystem-Engineerings entstehen. Es untersucht die subjektiv empfundene Verantwortung und erforscht die Wahrnehmung, Steuerung und Verteilung der vernetzten Prozesse vieler hybrider Akteure in mehreren heterogenen Feldern. Ein Mixed-Methods-Ansatz innerhalb des Forschungsdesigns der Grounded Theory und der Actor-Network Theory ermöglicht es, zu identifizieren und zu verfolgen, wie Verantwortlichkeiten organisiert und geteilt werden. Die Forschung zielt darauf ab, zu diskutieren, welche neuen ethischen Fragen auftauchen und welche Kompetenzen und Strategien des sicheren und zuverlässigen Robotik-Engineerings erforderlich sind.
Betreuer:
- Larissa Krainer, Institut für Medien- und Kommunikationswissenschaft, Universität Klagenfurt (AT)
- Joan Ramon Rodriguez-Amat, Culture and Creativity Research Institute, Communication and Computing Research Centre, Sheffield Hallam University (UK)
Dr. Christina Glasauer, BSc.MSc.
E-Mail:Christina [dot] Glasauer [at] aau [dot] at
Projekt: Security Conscious Robotics Engineering (SCoRE)
Die Softwareentwicklung ist eine sehr komplexe Aufgabe, die von Ingenieuren vielfältige Kompetenzen erfordert, um funktionale, sichere und zuverlässige Systeme bereitzustellen. Die anspruchsvollen Anforderungen der Kunden in Kombination mit den notorisch begrenzten Ressourcen der Softwareingenieure (z. B. Zeitdruck) können dazu führen, dass Systeme in Bezug auf Sicherheit und Zuverlässigkeit zu kurz kommen. Das Teilprojekt SCoRE befasst sich mit diesem Problem, indem es ein zweifaches Ziel verfolgt: Auf der Organisationsebene identifizieren wir Faktoren, die eine sichere und zuverlässige Entwicklung fördern oder behindern, und auf der individuellen Ebene identifizieren wir die Fähigkeiten, Persönlichkeitsmerkmale und/oder Einstellungen von Robotiksystemingenieuren, die die Entwicklung sicherer und zuverlässiger Robotiksysteme erleichtern. Daraufhin entwickeln wir standardisierte Beurteilungen sowohl organisatorischer als auch individueller Faktoren. Dieses Instrument ermöglicht es, strukturelle Defizite zu erkennen und die Bedürfnisse der Ingenieure zu bewerten, wodurch die Grundlage für die Bereitstellung angemessener Unterstützung und die Förderung der persönlichen Verbesserung von Robotiksystemingenieuren geschaffen wird.
Betreuer:
- Rainer W. Alexandrowicz, Institut für Psychologie, Universität Klagenfurt (AT)
- Larissa Krainer, Institut für Medien- und Kommunikationswissenschaft, Universität Klagenfurt (AT)
Sen. Scientist Tareq Mohammed Nazir, MEng.
E-Mail:Tareq [dot] Nazir [at] aau [dot] at
Projekt: Developing and Evolving Safe and Secure Robotic Systems (DevSafe)
Robotiksysteme gehören zu den komplexesten Systemen, die Menschen gebaut haben. Tatsächlich bestehen sie aus verteilten, mehreren Hardware- und Softwarekomponenten, die voneinander abhängen, und oft stellen solche Komponenten selbst komplexe Systeme oder Subsysteme dar. Die Wartung und Weiterentwicklung von Robotiksystemen ist eine Herausforderung, und jede Modifikation birgt das Risiko, Schwachstellen in der Implementierung oder Konfiguration des Robotiksystems einzuführen, die es anderen ermöglichen, das Robotiksystem anzugreifen. In diesem PhD-Projekt werden wir Techniken und Werkzeuge entwerfen, um detaillierte Informationen über Codeänderungen in Robotiksystemen zu extrahieren, wobei der Schwerpunkt auf Änderungen liegt, die Sicherheitslücken einführen. Basierend auf diesen Informationen werden wir Algorithmen und Techniken untersuchen, um die Auswirkungen von Codeänderungen auf die Sicherheit und Zuverlässigkeit von Robotiksystemen zu analysieren und zu bestimmen. Sie werden in Empfehlungssysteme integriert, die Ingenieure bei der Erkennung und Behebung von Schwachstellen unterstützen und ihnen helfen, auf verantwortungsvolle Weise sichere und zuverlässige Robotiksysteme zu entwickeln.
Betreuer:
- Martin Pinzger, Institut für Informationssysteme, Universität Klagenfurt (AT)
- Stefan Rass, Institut für Künstliche Intelligenz und Cybersicherheit, Universität Klagenfurt und LIT Secure and Correct Systems Lab, Johannes Kepler Universität Linz (AT)
Dipl.-Ing.Dr. Jasmin Wachter, BSc, BA
E-Mail:Jasmin [dot] Wachter [at] aau [dot] at
Projekt: Incentive-Based Security Engineering using Game Theory (INBASE-GET )
Sicherheit erfordert Sicherheit in Robotiksystemen. Nichtsdestotrotz wird letztere im Robotik-Software-Engineering stark vernachlässigt. Sicherheit ist ein kostspieliger, aber nicht beobachtbarer und nicht-funktionaler Teil der Software: Sie generiert keine Einnahmen – sie verhindert „nur“ Schaden. Aufgrund fehlender wirtschaftlicher Anreize wird Sicherheit entlang der Robotiksystem-Lieferkette vernachlässigt. Dies verursachte ein soziales Dilemma, bei dem das letzte Glied der Lieferkette den grössten Teil des Systems sichern muss – trotz begrenzter Kenntnisse über die Komponenten.
Die zentralen Forschungsfragen sind: Wie kann die Integration von (zuverlässiger) Sicherheit entlang der gesamten Robotik-Lieferkette angereizt werden, um ein (sozial) effizientes Ergebnis zu erzielen? Und auf mikroskopischer Ebene: Welche Mechanismen für Entwicklerteams installieren individuelle Verantwortung und (Haftung) an einem bestimmten Punkt innerhalb der Lieferkette? Die Methodik zur Bewältigung dieser Probleme ist die Entwicklung geeigneter (spieltheoretischer) Anreizmechanismen.
Betreuer:
- Wolfgang Faber, Institut für Künstliche Intelligenz und Cybersicherheit, Universität Klagenfurt (AT)
- Stefan Rass, Institut für Künstliche Intelligenz und Cybersicherheit, Universität Klagenfurt und LIT Secure and Correct Systems Lab, Johannes Kepler Universität Linz (AT)
- Paul Schweinzer, Institut für Volkswirtschaftslehre, Universität Klagenfurt (AT)
Wissenschaftlicher Beirat
- Bram Adams, Polytechnique Montreal, Kanada
- Tansu Alpcan, University of Melbourne, Australien
- Tamer Başar, University of Illinois, U.S.A.
- Ulrich Berger, Wirtschaftsuniversität Wien, Österreich
- Massimiliano Di Penta, University of Sannio, Italien
- Bernhard Dieber, Joanneum Research ROBOTICS, Österreich
- Lisa-Marie Faller, Fachhochschule Kärnten
- Harald Gall, Universität Zürich, Schweiz
- Endika Gil-Uriarte, Alias Robotics, Spanien
- Armin Grunwald, Karlsruher Institut für Technologie, ITAS, Deutschland
- Jessica Heesen, Universität Tübingen, Deutschland
- Dietmar Jannach, Universität Klagenfurt, Austria
- Mathias Karmasin, Universität Klagenfurt, Austria
- Muhammad Taimoor Khan, University of Greenwich, UK
- Mateusz Maciaś, Industrial Research Institute for Automation and Measurements PIAP, Polen
- Manos Panaousis, University of Greenwich, UK
- Matthias Rath, Pädagogische Hochschule Ludwigsburg, Deutschland
- Peter Schartner, Universität Klagenfurt, Austria
- Paul Schweinzer, Universität Klagenfurt, Austria
- Weitere nationale und internationale Kooperationspartner t.b.a.
Vorträge
- Duller, N. (2021a, Juni 10). Heteromatic Robots on Mars: Ethics of going Outer Space. Austrian Robotics Workshop 2021, Wien.
- Duller, N. (2022, Juni 10). Robots are Actor-Networks. Awareness, Bottom-Up Ethics and Transforming Responsibility. 31st International Conference on Robotics in Alpe-Adria-Danube Region, Klagenfurt.
- Duller, N. (2023, March 17). Collective Ethical Responsibility for Robotic Systems Engineering with Safety and Security, CERSE. STS-Hub.de 2023, Aachen.
- Duller, N., Glasauer, Ch., Nazir, T.M. & Wachter, J. (2023, April 13). The Robotics Safety & Security Stakeholder Cycle (RobSS Stakeholder Cycle): Model for Responsible, Safe and Secure Robotic Systems Engineering. Austrian Robotics Workshop 2023, Linz.
- Glasauer, Ch. (2022). Safety & Security by Design: Individuale und Organisationale Faktoren in der Entwicklung sicherer Robotiksysteme. 14. Tagung der Österreichischen Gesellschaft für Psychologie, 4.-7. September 2022, Universität Klagenfurt.
- Nazir, T. M. and Pinzger, M. (2022, September 15). SymDefFix – Sound Automatic Repair Using Symbolic Execution. 3rd International KLEE Workshop on Symbolic Execution, London, UK.
Veröffentlichungen
- Duller, N. (2022). Robots are Actor-Networks: Awareness, Bottom-Up Ethics and Transforming Responsibility. In A. Müller & M. Brandstötter (Hrsg.), Advances in Service and Industrial Robotics (S. 605–612). Springer International Publishing. https://doi.org/10.1007/978-3-031-04870-8_71
- Duller, N., & Rodriguez-Amat, J. R. (2021). Heteromatic Robots on Mars. Ethics of Going Outer Space. In W. Kubinger, M. Brandstötter, C. Schöffmann, & M. Vincze (Hrsg.), Proceedings of the Austrian Robotics Workshop 2021 (S. 57–63).
- Duller, N. (im Druck). Robotik und Weltraum. In P. Grimm, O. Zöllner, & K. E. Trost (Hrsg.), Digitale Ethik. Handbuch für Wissenschaft und Praxis. Nomos.
- Duller, N., Glasauer, Ch., Nazir, T.M. & Wachter, J. (2023, in print). The Robotics Safety & Security Stakeholder Cycle (RobSS Stakeholder Cycle): A Model for Responsible, Safe and Secure Robotic Systems Engineering. Proceedings of the Austrian Robotics Workshop 2023.
- Glasauer, C. (2023). The Prevent-Model: Human and Organizational Factors Fostering Engineering of Safe and Secure Robotic Systems. In Journal of Systems and Software (Vol. 195, p. 111548). Elsevier BV. https://doi.org/10.1016/j.jss.2022.111548
- Mayoral Vilches, V., Glera-Picón, A., Carbajo, U. A:, Rass, S., Pinzger, M., Maggi, F. Gil Uriarte, E. (2022), „Hacking planned obsolescense in robotics, towards security-oriented robot teardown“, Electronic Communication of the European Association of Software Science and Technology, vol. 80.
- Nazir, T. M. and Pinzger, M. (2022, September 15). SymDefFix – Sound Automatic Repair Using Symbolic Execution. 3rd International KLEE Workshop on Symbolic Execution, London, UK.
- Rass, S. König: Synchronization in Security Games, In: Fang, F., Xu, H., Hayel, Y. (eds) Decision and Game Theory for Security. GameSec 2022. Lecture Notes in Computer Science, vol 13727. Springer, Cham. https://doi.org/10.1007/978-3-031-26369-9_7
- Rass, S., König, S., Wachter, J., Mayoral-Vilches, V. & Panaousis, E. (2023) „Game-Theoretic APT defense: An Experimental Study on Robotics“, Computers & Security. In: Computers & Security vol. 132, pp. 103328, Elsevier, doi: https://doi.org/10.1016/j.cose.2023.103328.
Auszeichnungen
- Duller, N. (2023): Doktorand:innenpreis der Fachgruppe Kommunikations- und Medienethik der Deutschen Gesellschaft für Publizistik- und Kommunikationswissenschaft DGPuK.
- Wachter, J. (2023): Auslandsstipendium des Vereins Wirtschaft für Bildung.
Eingeladene Vorträge
23.6.2022: Glenda Hannibal (Human Computer Interaction Group, Technical University of Vienna): Trusting Robots in a Privacy Scenario
9.6.2022: Larissa Krainer, Stefan Rass (University of Klagenfurt, Johannes Kepler University Linz): Everything goes!? Ethical reflections on the question of why security never makes us completely safe
2.6.2022: Rainer W. Alexandrowicz, Martin Pinzger (AAU): Automating software engineering: What developers should know
12.5.2022: Mathias Brandstötter (Joanneum Research Robotics): Safety Aspects of Human-Robot Systems
5.5.2022: Gabriele Lenzini (Interdisciplinary Centre for Security, Reliability and Trust (IRiSC), Université du Luxembourg): Overview of Software Vulnerability Disclosure Practices
28.4.2022: Lisa-Marie Faller (Robotics and Additive Fabrication, Carinthia University of Applied Science (FH Kärnten)): Digital Fabrication for Medical and Assistance Devices
7.4.2022: Gerhard Leitner (Institut für Informatik-Systeme, Universität Klagenfurt): From Human-Computer-Interaction (HCI) to Human-Robot-Interaction (HRI) – state of the art, challenges and potentials
31.3.2022: Oana Mitrea (Institut für Intelligente Systemtechnologien, Universität Klagenfurt): Autonomous driving in use: a closer look at the mobility of families
24.3.2022: Anita Thaler (Interdisciplinary Research Centre for Technology, Work and Culture (IFZ)): Techno-feminist issues of robotics and AI
17.3.2022: Armin Grunwald (Institute of Philosophy, KIT): „Mr. Robot Colleague …!“ On the humanisation of robots and their ethical pitfalls.
10.3.2022: Victor Mayoral-Vilches (RoboticsSystems Architect, Robotics, Xilinx): Robot Cybersecurity
22.4.2021: Lisa-Marie Faller (Professor for Robotics, FH Kärnten/University of Applied Sciences/Engineering & IT)
24.2.2021: Bernhard Dieber (Joanneum Research, Institute for Robotics and Mechatronics, Research Group Research Group Robot Systems Technologies)